2.6 KiB
2.6 KiB
LIS3DH
A C89 driver for the 3-axis accelerometer LIS3DH by ST. Supports both i2c and SPI.
Features
- FIFO of varying watermark level, up to 32
- HP filter
- 2G, 4G, 8G and 16G
- All power modes
- Interrupt generation (soon)
- Free-fall detection (soon)
- Single and double click detection (soon)
- 4D/6D orientation detection (soon)
FIFO output example
$ ./lis3dh
x: 0.5320, y: -0.8800, z: -0.0600 mag: 1.0301
x: 0.5440, y: -0.8680, z: -0.0760 mag: 1.0272
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0760 mag: 1.0306
x: 0.5440, y: -0.8720, z: -0.0720 mag: 1.0303
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0720 mag: 1.0392
x: 0.5480, y: -0.8800, z: -0.0800 mag: 1.0398
x: 0.5480, y: -0.8960, z: -0.0960 mag: 1.0547
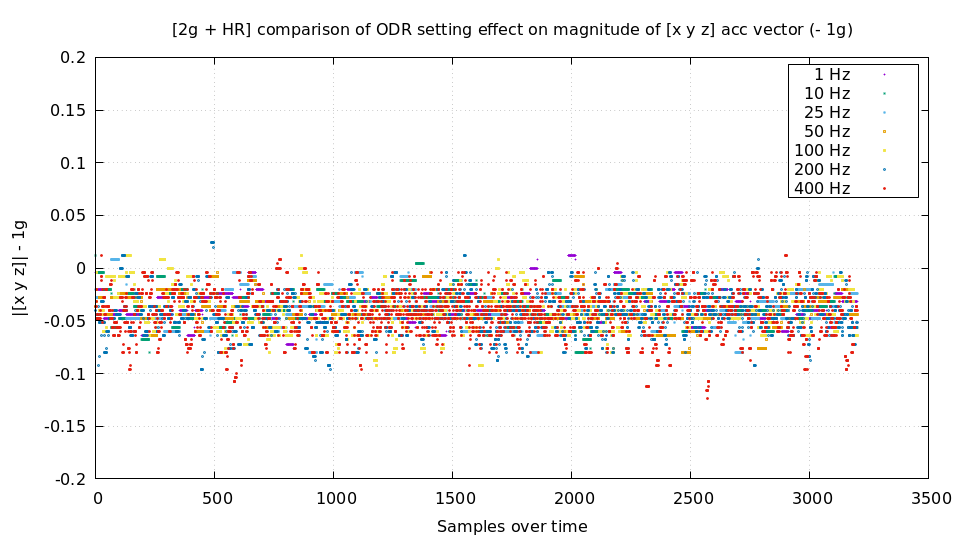
Noise at 2G
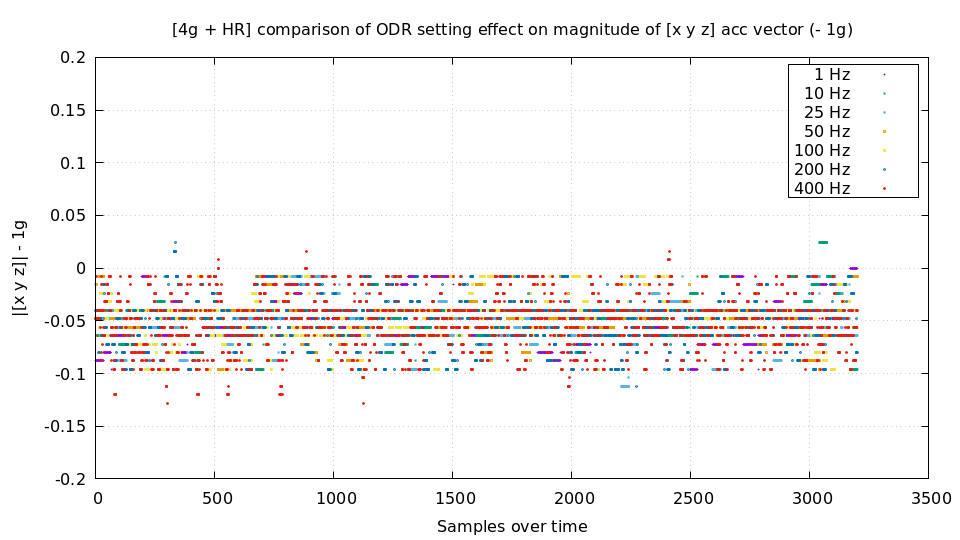
Noise at 4G
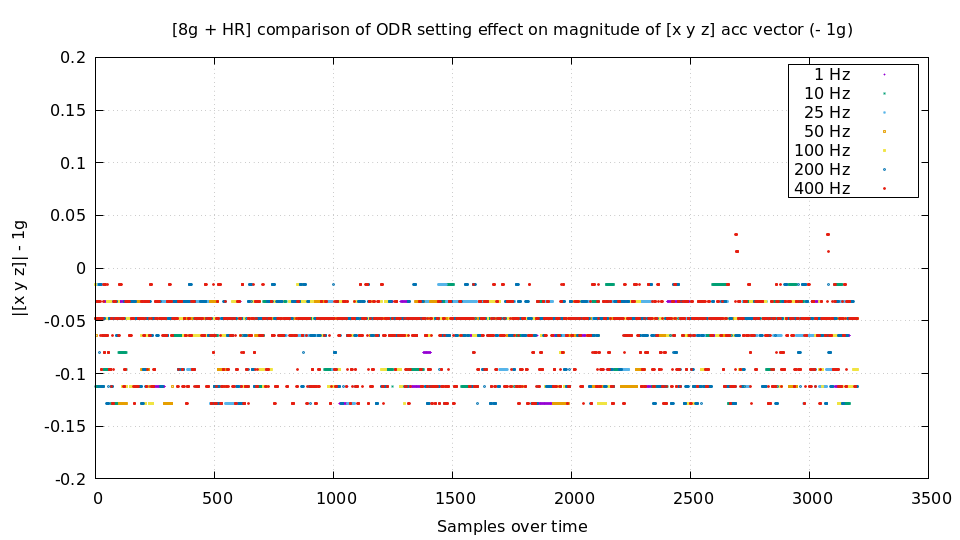
Noise at 8G
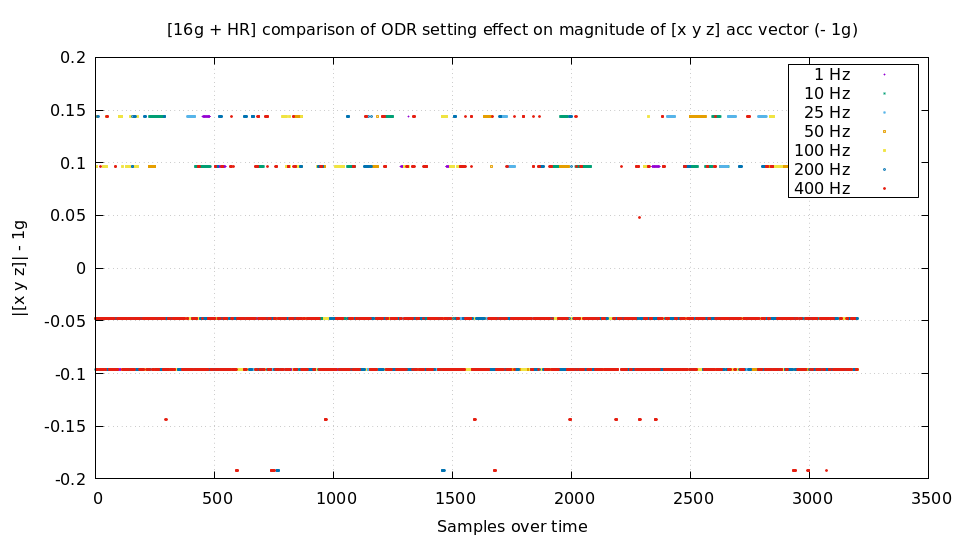
Noise at 16G
Using i2c on STM32
Simple example code
#define LIS3DH_I2C_ADDR 0x18
int i2c_write(uint8_t reg, uint8_t value) {
uint8_t buf[2] = { reg, value };
HAL_I2C_Master_Transmit(&hi2c2, LIS3DH_I2C_ADDR << 1, buf, 2, HAL_MAX_DELAY);
return 0;
}
int i2c_read(uint8_t reg, uint8_t *dst, uint32_t size) {
uint8_t send[2] = { reg, 0x00 };
HAL_I2C_Master_Transmit(&hi2c2, LIS3DH_I2C_ADDR << 1, send, 2, HAL_MAX_DELAY);
HAL_I2C_Master_Receive(&hi2c2, LIS3DH_I2C_ADDR << 1, dst, size, HAL_MAX_DELAY);
return 0;
}